بینایی ماشین چیست؟
بینایی ماشین چیست؟ بینایی ماشین را می توان از جهتی زیرمجموعه ای از هوش مصنوعی دانست. بنا به گفته انجمن تصویربرداری اتوماتیک (AIA)، بینایی ماشینی شامل همه کاربردهای صنعتی و غیرصنعتی است که در آنها ترکیبی از سختافزار و نرمافزار به دستگاهها در اجرای عملکردهای آنها از طریق ضبط و پردازش تصاویر، راهنمایی عملیاتی ارائه میدهند. اگرچه بینایی ماشین صنعتی از بسیاری الگوریتمها و رویکردهای مشابه بینایی کامپیوتری آموزشی/آکادمیک و دولتی/نظامی استفاده میکند، با این حال محدودیتها متفاوت است.
سیستمهای بینایی صنعتی نیاز به استحکام، قابلیت اطمینان و پایداری بیشتری نسبت به یک سیستم بینایی آموزشی/آکادمیک دارند و معمولاً هزینه آنها به مراتب کمتر از آنهایی است که در کاربردهای دولتی/نظامی استفاده میشود. بنابراین، بینایی ماشین صنعتی به معنای هزینه پایین، دقت قابل قبول، استحکام بالا، قابلیت اطمینان بالا و پایداری مکانیکی و حرارتی بالاست.
سیستمهای بینایی ماشین به روی حسگرهای دیجیتال محافظت شده داخل دوربینهای صنعتی با اپتیکهای تخصصی برای گرفتن تصاویر تکیه دارند، به طوری که سختافزار و نرمافزار کامپیوتری میتوانند تصاویر را پردازش، تجزیه و تحلیل کنند و ویژگیهای مختلف را برای تصمیمگیری اندازهگیری نمایند.
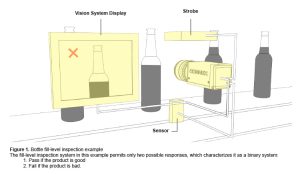
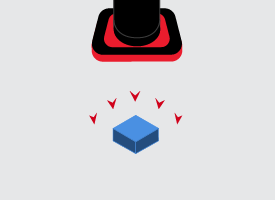
به عنوان مثال، سیستم بازرسی سطح پر شدگی در یک نوشیدنی را در نظر بگیرید (شکل 1). هر بطری نوشیدنی از طریق یک حسگر بازرسی عبور میکند که یک سیستم بینایی را برای فلاش زدن نور استروب و گرفتن عکس از بطری فرا میخواند. پس از تصاحب تصویر و ذخیره آن در حافظه، نرمافزار بینایی، آن را پردازش یا تجزیه و تحلیل میکند و بر اساس سطح پر شدگی بطری، پاسخ قبول یا رد صادر میکند. اگر سیستم شناسایی کند که بطری به درستی پر نشده است – یک عدم قبول- به یک منحرفکننده سیگنال میدهد تا بطری را رد کند. یک کاربر میتواند بطریهای رد شده و آمار فرایند مداوم را در یک نمایشگر مشاهده کند.
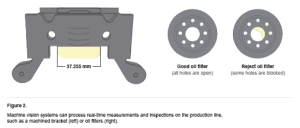
سیستمهای بینایی ماشین همچنین میتوانند اندازهگیریهای عینی انجام دهند، مانند تعیین فاصله شمع یا ارائه اطلاعات مکانی که یک ربات را برای همتراز کردن قطعات در یک فرایند تولید هدایت میکند. شکل 2 نمونههایی از نحوه استفاده از سیستمهای بینایی ماشین برای تایید یا رد فیلترهای روغن (راست) و اندازهگیری عرض یک برچسب مرکزی روی یک براکت (چپ) را نشان میدهد.
مزایای بینایی ماشین
مهم ترین مزایای بینایی ماشین چیست؟ بینایی باعث بهبود کیفیت و بهرهوری میشود، در حالی که هزینههای تولید را کاهش میدهد
در حالی که بهترین بینایی برای تفسیر کیفی یک صحنه پیچیده و بدون ساختار بینایی انسان است، بینایی ماشین در اندازهگیری کمی یک صحنه ساختار یافته به دلیل سرعت، دقت و تکرارپذیری آن عالی است. به عنوان مثال، در یک خط تولید، یک سیستم بینایی ماشین میتواند صدها یا حتی هزاران قطعه در دقیقه را بازرسی کند. یک سیستم بینایی ماشینی که بر اساس وضوح دوربین و اپتیک مناسب ساخته شده باشد، به راحتی میتواند جزئیات شیء را بازرسی کند که برای چشم انسان خیلی کوچک است.
با حذف تماس فیزیکی بین یک سیستم آزمایش و قطعات تحت آزمایش، بینایی ماشین از آسیب دیدن قطعات جلوگیری میکند و زمان و هزینههای نگهداری مرتبط با فرسودگی اجزای مکانیکی را حذف میکند. بینایی ماشین مزایای اضافی ایمنی و عملیاتی را با کاهش درگیری انسان در یک فرایند تولید به همراه دارد. علاوه بر این، آلودگی انسانی اتاقهای تمیز را جلوگیری میکند و کارگران انسانی را از محیطهای خطرناک محافظت میکند.
کاربردهای بینایی ماشین چیست؟
راهنمایی، شناسایی، اندازهگیری و بازرسی
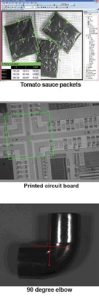
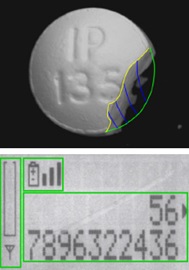
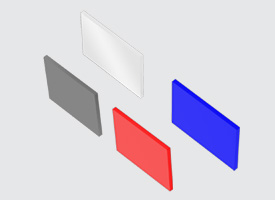
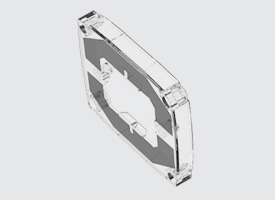
اولین گام در بینایی ماشین چیست؟ معمولاً اولین گام در هر نوع کاربرد بینایی ماشین، چه سادهترین تایید مونتاژ و چه یک انتخاب رباتیک پیچیده 3D، الگویابی برای یافتن شیء یا ویژگی مورد نظر در دید میدانی دوربین است. پیدا کردن شیء مورد نظر اغلب تعیینکننده موفقیت یا شکست است. اگر ابزارهای نرمافزاری الگویابی نتوانند قطعه را به طور دقیق در تصویر پیدا کنند، آنگاه نمیتوانند قطعه را هدایت کنند، شناسایی کنند، بازرسی کنند، شمارش کنند یا اندازهگیری کنند. در حالی که پیدا کردن یک قطعه به نظر ساده میآید، تفاوتها در ظاهر آن در محیطهای تولید واقعی میتواند آن مرحله را بسیار چالشبرانگیز کند (شکل 3). اگرچه سیستمهای بینایی برای شناسایی قطعات بر اساس الگوها آموزش داده میشوند، حتی کنترلشدهترین فرایندها اجازه برخی تغییرپذیری در ظاهر یک قطعه را میدهند (شکل 4).
برای دستیابی به نتایج دقیق، قابل اطمینان و تکرارپذیر، ابزارهای مکانیابی قطعات یک سیستم بینایی باید شامل هوش کافی باشند تا بتوانند الگوهای آموزشی را به سرعت و دقیق با اشیاء واقعی (الگویابی) در حرکت روی یک خط تولید مقایسه کنند. مکانیابی قطعه اولین گام اساسی در چهار دسته اصلی کاربردهای بینایی ماشین است. این دستهها شامل موارد زیر هستند:
* راهنمایی
* شناسایی
* اندازهگیری
* بازرسی
که میتوان آن را با سرواژه GIGI به یاد آورد.
راهنمایی
راهنمایی در بینایی ماشین چیست؟ راهنمایی ممکن است به چند دلیل انجام شود. اول اینکه، سیستمهای بینایی ماشین میتوانند موقعیت و جهت یک قطعه را پیدا کنند، آن را با یک تولرانس مشخص مقایسه کنند و اطمینان حاصل کنند که در زاویه صحیح برای تأیید مونتاژ مناسب قرار دارد. سپس، راهنمایی میتواند برای گزارش موقعیت و جهت یک قطعه در فضای 2D یا 3D به یک ربات یا کنترلر ماشین استفاده شود که اجازه میدهد ربات قطعه را پیدا کند یا ماشین، قطعه را همتراز کند. راهنمایی بینایی ماشین سرعت و دقت بسیار بیشتری نسبت به موقعیتیابی دستی در وظایفی مانند چیدن قطعات روی یا خارج از پالتها، بستهبندی قطعات از روی یک نوار نقاله، یافتن و همتراز کردن قطعات برای مونتاژ با سایر اجزا، قرار دادن قطعات روی یک قفسه کاری یا برداشتن قطعات از سبدها به دست میآورد.
راهنمایی همچنین میتواند برای همترازسازی سایر ابزارهای بینایی ماشین استفاده شود. این ویژگی بسیار قدرتمند بینایی ماشین است زیرا قطعات ممکن است در جهتگیریهای ناشناخته در طول تولید به دوربین ارائه شوند. با پیدا کردن قطعه و سپس همتراز کردن سایر ابزارهای بینایی ماشین با آن، بینایی ماشین امکان ثابتسازی اتوماتیک ابزار را فراهم میکند. این شامل پیدا کردن ویژگیهای کلیدی روی یک قطعه برای امکان موقعیتیابی دقیق ابزارهای نرمافزاری کولیس، بلوب، لبه یا سایر بیناییهای ماشینی است تا بتوانند به درستی با قطعه تعامل داشته باشند. این رویکرد به تولیدکنندگان اجازه میدهد محصولات متعددی را روی یک خط تولید تولید کنند و نیاز به ابزارگیری سختافزاری گرانقیمت برای حفظ موقعیت قطعه حین بازرسی را کاهش میدهد.
گاهی راهنمایی نیاز به الگویابی هندسی دارد. ابزارهای الگویابی باید تغییرات زیاد در کنتراست و روشنایی را تحمل کنند و همچنین تغییرات مقیاس، چرخش و سایر عوامل را در حالی که هر بار به طور قابل اطمینان قطعه را پیدا میکنند. این به این دلیل است که اطلاعات مکان کسب شده توسط الگویابی امکان همترازسازی سایر ابزارهای نرمافزاری بینایی ماشین را فراهم میکند.
شناسایی
فناوریهای بینایی ماشین امکان خواندن کدها و کاراکترهای الفبایی-عددی را فراهم میکنند
یک سیستم بینایی ماشین برای شناسایی و تشخیص قطعات، بارکدها (1-بُعدی)، کدهای ماتریس داده (2-بُعدی)، علامتگذاریهای مستقیم روی قطعه (DPM) و کاراکترهای چاپ شده روی قطعات، برچسبها و بستهبندیها را میخواند. یک سیستم شناسایی نویسههای اپتیکی (OCR) کاراکترهای الفبایی-عددی را بدون دانش قبلی میخواند، در حالی که یک سیستم تایید نویسههای اپتیکی (OCV) وجود یک رشته کاراکتر را تأیید میکند. علاوه بر این، سیستمهای بینایی ماشین میتوانند قطعات را با پیدا کردن یک الگوی منحصر به فرد یا بر اساس رنگ، شکل یا اندازه شناسایی کنند.
کاربردهای DPM یک کد یا رشته کاراکتر را مستقیماً روی قطعه علامت میزنند. تولیدکنندگان در تمام صنایع معمولاً از این تکنیک برای جلوگیری از خطا، فراهم کردن استراتژیهای محدودسازی کارآمد، نظارت بر کنترل فرایند و متریکهای کنترل کیفیت و اندازهگیری مشکلات در یک کارخانه مانند گلوگاهها استفاده میکنند. ردیابی پذیری از طریق علامتگذاری مستقیم قطعه، بهبود ردیابی محصول و تایید اصالت قطعه را به همراه دارد. همچنین دادههای سطح واحد را برای پشتیبانی فنی برتر و خدمات تعمیرات گارانتی از طریق مستندسازی نسبشناسی قطعات در یک زیرمجموعه که محصول نهایی را تشکیل میدهند، فراهم میکند.
اطلاعات ردیابی پذیری بارکدهای معمولی برای صورتحساب و کنترل موجودی خردهفروشی پذیرش گستردهای پیدا کردهاند با این حال، نیاز به داده بیشتری نسبت به آنچه که در یک بارکد استاندارد جای میگیرد، وجود دارد. برای افزایش ظرفیت داده، شرکتها کدهای 2-بُعدی مانند ماتریس داده را توسعه دادند که میتوانند اطلاعات بیشتری از جمله تولیدکننده، شناسایی محصول، شماره سری و حتی یک شماره سریال منحصر به فرد برای تقریباً هر کالای آماده را ذخیره کنند.

اندازهگیری
اندازهگیری فواصل و مکانها برای ارزیابی انطباق با مشخصات
یک سیستم بینایی ماشین برای اندازهگیری، فواصل بین دو یا چند نقطه یا مکانهای هندسی روی یک شیء را محاسبه میکند و تعیین میکند که آیا این اندازهگیریها با مشخصات مطابقت دارند یا خیر. در غیر این صورت، سیستم بینایی یک سیگنال خطا به کنترلر ماشین ارسال میکند که منجر به فعال شدن یک مکانیزم رد کننده(عدم قبول) میشود که شیء را از خط خارج میکند.
در عمل، یک دوربین با مانت ثابت تصاویر قطعات را با گذر از میدان دید دوربین ضبط میکند و سیستم از نرمافزار برای محاسبه فواصل بین نقاط مختلف در تصویر استفاده میکند. از آنجایی که بسیاری از سیستمهای بینایی ماشین میتوانند ویژگیهای شیء را تا 0.0254 میلیمتر اندازهگیری کنند، آنها میتوانند تعدادی از کاربردهایی که سنتاً توسط اندازهگیری تماسی انجام میشد را پوشش دهند.

بازرسی
شناسایی عیوب، غیرعادیها و قسمت های خطادار در تولید
سیستم بینایی ماشینی برای بازرسی عیوب، آلودگیها، اشکالات عملکردی و سایر غیرعادیهای تولید محصولات را شناسایی میکند. مانند بررسی قرصهای دارو برای عیوب، شناسایی آیکونها در نمایشگرها یا تأیید حضور پیکسلها یا سنجش میزان تناقض روشنایی پشتی در نمایشگرهای لمسی.
بینایی ماشینی در صنایع دارویی و غذایی همچنین میتواند محصولات را برای کاملبودن، مانند همخوانی محصول و بستهبندی و همچنین بررسی مهرهای ایمنی، پوششها و حلقههای بطری بررسی کند.
سیستمهای بینایی طراحیشده برای بازرسی، ظاهر بصری ماده موردنظر را نظارت میکنند. با استفاده از آنالیز آماری، سیستم خودکار عیوب احتمالی سطح ماده را شناسایی کرده و آنها را بر اساس شباهت در کنتراست، بافت و یا هندسه دستهبندی میکند.
اکثر سیستمهای بینایی ماشینی شامل کتابخانهای از ابزارهای نرمافزاری برای انواع بازرسیها هستند که امکان ترکیب بازرسیهای مختلف از تصاویر ثبتشده را فراهم میکنند.
اجزای سیستم بینایی ماشین
موفقیت یک سیستم بینایی وابسته به استفاده از اجزای کلیدی است
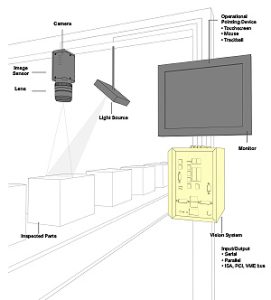
اجزای اصلی یک سیستم بینایی ماشین شامل روشنایی، لنز، حسگر تصویر، پردازش بینایی و ارتباطات است. روشنایی قطعه مورد بازرسی را روشن میکند تا ویژگیهای آن مشخص شوند تا بتوانند به وضوح توسط دوربین دیده شوند. لنز تصویر را ضبط میکند و آن را به صورت نور به حسگر ارائه میدهد. حسگر در یک دوربین بینایی ماشین این نور را به یک تصویر دیجیتال تبدیل میکند که سپس برای تجزیه و تحلیل به پردازنده ارسال میشود.
پردازش بینایی شامل الگوریتمهایی است که تصویر را بررسی و اطلاعات مورد نیاز را استخراج میکنند، بازرسیهای لازم را انجام میدهند و تصمیمگیری میکنند. در نهایت، ارتباطات معمولاً با استفاده از سیگنال ورودی/خروجی گسسته یا دادههای ارسال شده از طریق اتصال سریال به یک دستگاه که اطلاعات را ثبت یا استفاده میکند، برقرار میشود.
اکثر اجزای سختافزاری سیستم بینایی ماشین مانند ماژولهای روشنایی، حسگرها و پردازندهها به صورت تجاری در دسترس هستند. سیستمهای بینایی ماشین میتوانند از اجزای تجاری موجود تشکیل شوند، یا به عنوان یک سیستم یکپارچه با تمامی اجزا در یک دستگاه خریداری شوند.
اجزای مختلف یک سیستم بینایی ماشین شامل موارد زیر است:
* روشنایی
* لنزها
* پردازش بینایی
* حسگر تصویر
* ارتباطات
روشنایی بینایی ماشین
روشنایی یکی از مهمترین جنبههای کاربردهای بینایی ماشین است. عدم روشنایی مناسب هدف میتواند منجر به از دست رفتن اطلاعات و بهرهوری شود. یک تکنیک روشنایی شامل یک منبع نور و قرارگیری آن نسبت به قطعه و دوربین است. سیستمهای بینایی Cognex ترکیبات مختلفی از گزینههای روشنایی خارجی و یکپارچه بر اساس محیط و کاربرد ارائه میدهند.
روشنایی پشتی
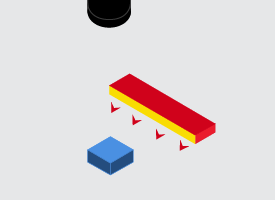
روشنایی پشتی روشنایی یکنواختی را از پشت هدف به سمت جلو پرتاب میکند و سایه هدف را برجسته میکند. از این نوع روشنایی برای تشخیص وجود/عدم وجود سوراخ یا شکاف، اندازهگیری یا تایید شکل کانتور هدف و همچنین برجسته کردن ترکها، حبابها و خراشها روی قطعات شفاف هدف استفاده میشود. توجه داشته باشید که جزئیات سطحی با این نوع روشنایی از بین میرود.
روشنایی نواری
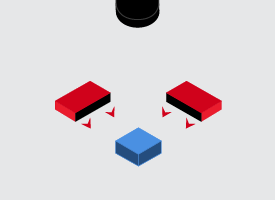
روشنایی نواری نواری از نور را روی هدف یا در امتداد لبه هدف برای روشنایی یکنواخت در طول منطقه محلی فراهم میکند. آن میتواند با سایر چراغهای نواری برای پوشش کل هدف از همه جهات ترکیب شود. بسته به زاویه نور و دوربین، روشنایی نواری میتواند بازتاب از سطوح براق را افزایش یا کاهش دهد. از آن برای افزایش کنتراست در سطوح مات مانند کاغذ یا مقوا، تعریف لبهها یا برجسته کردن ویژگیهای سطحی استفاده میشود.
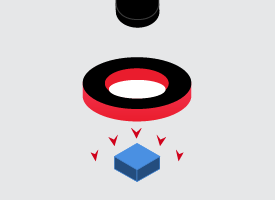
روشنایی میدان تاریک
تکنیک روشنایی میدان تاریک نوری را در زاویه کمی نسبت به هدف فراهم میکند. هر ویژگی سطحی – خراش، لبه، اثر انگشت، شیار – نور را به دوربین بازتاب میکند و این ویژگیهای سطحی را روشن نشان میدهد، در حالی که بقیه سطح تاریک است. این تکنیک میتواند با هر گزینه روشنایی جهتدار (نواری، حلقوی، لکهای) که اجازه میدهد نور به سطح قطعه زاویه دار شود، ایجاد شود.
روشنایی نورپراکنده محوری (هممحور)
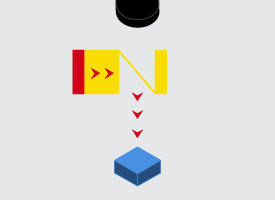
روشنایی نورپراکنده محوری، که به آن روشنایی هممحور هم گفته میشود، نور را عمود بر هدف انتقال میدهد و از یک آینه برای ارسال پرتوهای نور در زاویه 90 درجه نسبت به هدف استفاده میکند. این تکنیک سطوح براق عمود بر دوربین را برجسته میکند. سطوحی که نسبت به دوربین زاویه دارند تیره خواهند بود. این تکنیک روشنایی سایهها را کاهش میدهد و وارونگی بسیار کمی دارد. این آن را برای تشخیص عیوب در سطوح براق و صاف، اندازهگیریها یا بازرسی اشیای براق یا بازرسی بستهبندیهای شفاف مفید میسازد.
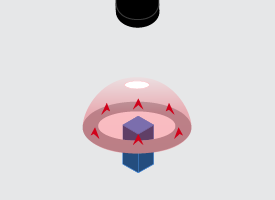
روشنایی نورپراکنده گنبدی/حلقوی
تکنیک روشنایی نورپراکنده نور را پراکنده میکند تا وارونگی روی قطعات بازتابنده را کاهش دهد. این تکنیک میتواند بر روی همه انواع روشنایی جهتدار (نواری، گنبدی، حلقوی) برای فراهم کردن پخش یکنواختتر نور در سراسر هدف اعمال شود. این تکنیک روشنایی در کاهش نویزهای روشنایی مانند وارونگی و نقاط داغ از چراغهای جهتدار محوری مانند چراغهای حلقوی مفید است.
روشنایی گنبدی
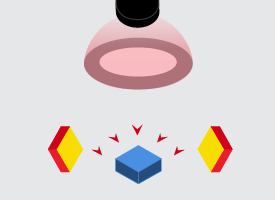
روشنایی گنبدی نور یکنواختی را از زوایای مختلف فراهم میکند که منجر به عدم وارونگی حتی روی اشیای آینهای میشود. اغلب به آن به عنوان روشنایی “روز ابری” اشاره میشود زیرا روشنایی نامتقارن (وارونگی / سایه) را حذف کرده و روشنایی را به طور مساوی در سراسر سطح قطعه پخش میکند. روشنایی گنبدی غالباً برای بازرسی سطوح براق، منحنی یا زبر استفاده میشود. برای اثربخشی، چراغهای گنبدی نیاز به نزدیکی زیاد به هدف دارند.
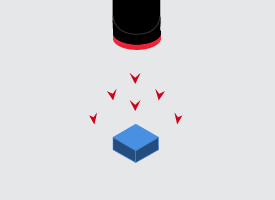
میدان تاریک با زاویه کم
تکنیک روشنایی میدان تاریک با زاویه کم نوری را در زاویه بسیار کمی (10-15 درجه) نسبت به هدف فراهم میکند. هر ویژگی سطحی از جمله گرد و غبار، خراش و حتی اثر انگشت روی یک سطح آینهای نور را به دوربین بازتاب میکند و این ویژگیهای سطحی را روشن نشان میدهد، در حالی که بقیه سطح تاریک است. این تکنیک روشنایی به ویژه برای بازرسی سطح روی اهداف براق و با بازتاب بالا خوب است. هر تفاوت ارتفاعی در سطح برجسته میشود.
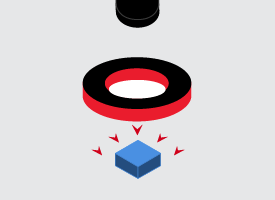
روشنایی حلقوی
روشنایی حلقوی دایره یا حلقهای از نور روشن و شدید است که روشنایی بدون سایه و کنتراست تصویر خوبی فراهم میکند. روشنایی حلقوی یک نوع روشنایی رایج است که دامنه وسیعی از کاربردها را به دلیل انعطافپذیری آن پوشش میدهد. توجه داشته باشید که میتواند باعث وارونگی براق روی قطعات بازتابنده شود.
نور یکپارچه قدرت بالا
نور یکپارچه قدرت بالا (HPIL) نور مستقیم قطبیده یا غیر قطبیده را روی هدف تابانده و در دسترس سیستمهای بینایی ماشین In-Sight 7000 برخی مدلها است.
نور یکپارچه In-Sight
نور یکپارچه In-Sight یک چراغ حلقوی نورپراکنده است که روشنایی یکنواخت روشنی روی هدف برای کاربردهای بینایی ماشین فراهم میکند. این نور یکپارچه سایهزنی را کاهش داده و روشنایی یکنواختی روی اشیای مات فراهم میکند. به دلیل ماهیت نورپراکنده، در فواصل کاری نزدیکتر (کمتر از 70 میلیمتر)، این نور همچنین تکنیک روشنایی میدان تاریک را فراهم میکند. نور یکپارچه In-Sight در دسترس برخی از سیستمهای بینایی ماشین In-Sight 7000 است.
فیلترهای رنگی
فیلترهای رنگی کنتراست ایجاد میکنند تا ویژگیهای شیء را روشنتر یا تیرهتر کنند. فیلترهای رنگی مشابه روشنتر (مثلاً نور قرمز ویژگیهای قرمز را روشنتر میکند) و فیلترهای رنگی مخالف تیرهتر میکنند (مثلاً نور قرمز ویژگیهای سبز را تیرهتر میکند).
قطبی کننده ها
قطبکنندهها فیلترهایی هستند که جلوی لنز دوربین و LEDها با جابهجایی 90 درجه قرار میگیرند. قطبکنندهها در کاربردهای تصویربرداری برای کاهش وارونگی یا نقاط داغ و بهبود کنتراست استفاده میشوند تا اشیای به طور قابل شناسایی باشند.
لنزهای بینایی ماشین
لنز تصویر را ضبط کرده و به حسگر تصویر در دوربین منتقل میکند. لنزها از نظر کیفیت اپتیکی و قیمت متفاوت هستند، لنز مورد استفاده کیفیت و وضوح تصویر ضبط شده را تعیین میکند. اکثر دوربینهای سیستمهای بینایی دو نوع اصلی لنز ارائه میدهند: لنزهای تعویضپذیر و لنزهای ثابت. لنزهای تعویضپذیر معمولا C-mount یا CS-mount هستند. ترکیب مناسب لنز و افزاینده بهترین تصویر ممکن را تصاحب میکند. یک لنز ثابت به عنوان بخشی از یک سیستم بینایی مستقل معمولا از فوکوس اتوماتیک استفاده میکند که میتواند یک لنز تنظیم شده مکانیکی یا یک لنز مایع باشد که میتواند به طور اتوماتیک روی قطعه فوکوس کند. لنزهای فوکوس اتوماتیک معمولا دید میدان ثابتی در یک فاصله مشخص دارند.
حسگر تصویر بینایی ماشین
حسگر تصویری بینایی ماشین چیست؟
توانایی دوربین در تصاحب تصویری که به درستی روشنایی شده از شیء تحت بازرسی نه تنها وابسته به لنز بلکه وابسته به حسگر تصویر درون دوربین نیز هست. حسگرهای تصویر معمولا از فناوری دستگاه انتقال بار جفت شده (CCD) یا نیمههادی اکسید فلزی مکمل (CMOS) برای تبدیل نور (فوتونها) به سیگنالهای الکتریکی (الکترونها) استفاده میکنند. در واقع وظیفه حسگر تصویر تصاحب نور و تبدیل آن به یک تصویر دیجیتال با توازن نویز، حساسیت و محدوده پویا است. تصویر مجموعهای از پیکسلها است. نور کم پیکسلهای تیره تولید میکند، در حالی که نور زیاد پیکسلهای روشنتر ایجاد میکند. مهم است که اطمینان حاصل شود دوربین دارای وضوح حسگر مناسب برای کاربرد است. هر چه وضوح بالاتر باشد، جزئیات تصویر بیشتر خواهد بود و اندازهگیریها دقیقتر خواهند بود. اندازه قطعه، تولرانسهای بازرسی و سایر پارامترها وضوح مورد نیاز را تعیین میکنند.
پردازش بینایی
پردازش بینایی در بینایی ماشین چیست؟
پردازش مکانیزم استخراج اطلاعات از یک تصویر دیجیتال است و ممکن است به صورت خارجی در یک سیستم مبتنی بر رایانه شخصی یا داخلی در یک سیستم بینایی مستقل انجام شود. پردازش توسط نرمافزار انجام میشود و از چند مرحله تشکیل شده است. ابتدا، تصویر از حسگر تصاحب میشود. در برخی موارد، ممکن است پیشپردازش برای بهینهسازی تصویر و اطمینان از برجسته شدن تمام ویژگیهای ضروری مورد نیاز باشد. سپس، نرمافزار ویژگیهای خاص را پیدا میکند، اندازهگیریها را انجام میدهد و آنها را با مشخصات مقایسه میکند. در نهایت، تصمیمگیری انجام میشود و نتایج ارتباط داده میشوند.
در حالی که بسیاری از اجزای فیزیکی یک سیستم بینایی ماشین (مانند روشنایی) مشخصات قابل مقایسهای ارائه میدهند، الگوریتمهای سیستم بینایی آنها را از هم متمایز میکنند و باید در صدر فهرست اجزای کلیدی برای ارزیابی هنگام مقایسه راه حلها قرار گیرند. بسته به سیستم یا کاربرد خاص، نرمافزار بینایی پارامترهای دوربین را پیکربندی میکند، تصمیم قبول یا رد را میگیرد، با کارخانه ارتباط برقرار میکند و از توسعه HMI پشتیبانی میکند.
حسگر تصویر بینایی ماشین
یک مؤلفه حیاتی برای تصاحب تصویر
توانایی دوربین در تصاحب تصویری که به درستی روشنایی شده از شیء تحت بازرسی، نه تنها به لنز بلکه به حسگر تصویر درون دوربین نیز بستگی دارد. حسگرهای تصویر معمولا از فناوری دستگاه انتقال بار جفتشده (CCD) یا نیمههادی اکسید فلزی مکمل (CMOS) برای تبدیل نور (فوتونها) به سیگنالهای الکتریکی (الکترونها) استفاده میکنند. در واقع وظیفه حسگر تصویر تصاحب نور و تبدیل آن به یک تصویر دیجیتال با تعادل نویز، حساسیت و محدوده پویا است. تصویر مجموعهای از پیکسلهاست. نور کم پیکسلهای تیره تولید میکند در حالی که نور زیاد پیکسلهای روشنتر ایجاد میکند. مهم است که مطمئن شویم دوربین وضوح حسگر مناسب برای کاربرد را دارد. هرچه وضوح بالاتر باشد، جزئیات تصویر بیشتر خواهد بود و اندازهگیریها دقیقتر خواهند بود. اندازه قطعه، تولرانسهای بازرسی و سایر پارامترها وضوح مورد نیاز را تعیین میکنند.
ارتباطات
اتصال اجزای بینایی ماشین
از آنجایی که سیستمهای بینایی اغلب از انواع اجزای آماده استفاده میکنند، این اجزا باید به سرعت و آسانی با سایر عناصر ماشین هماهنگ شوند و متصل شوند. معمولاً این کار یا با استفاده از سیگنال ورودی/خروجی گسسته و یا دادههای ارسالی از طریق اتصال سریال به یک دستگاه که اطلاعات را ثبت یا استفاده میکند، انجام میشود. نقاط ورودی/خروجی گسسته ممکن است به یک کنترلکننده منطقی برنامهپذیر (PLC) متصل شوند که از این اطلاعات برای کنترل یک سلول کاری یا یک نشانگر مانند چراغ پشتهای یا مستقیماً به یک سولنوئید که ممکن است برای فعال کردن یک مکانیزم ردکننده استفاده شود، استفاده میکند. ارتباط دادهای از طریق یک اتصال سریال میتواند به صورت یک خروجی سریال RS-232 متعارف یا اترنت باشد.
برخی سیستمها از یک پروتکل صنعتی سطح بالاتر مانند Ethernet/IP استفاده میکنند که ممکن است به یک دستگاه مانند یک نمایشگر یا سایر رابطهای عامل متصل شود تا یک رابط کاربری خاص کاربرد برای نظارت و کنترل آسان فرایند فراهم کند.
انواع مختلف سیستمهای بینایی
انتخاب سیستم بینایی مناسب برای برآورده کردن نیازهای کاربردهای بینایی خاص شما حیاتی است. به طور کلی، انواع مختلف سیستمهای بینایی شامل سیستمهای بینایی 1بُعدی، سیستمهای بینایی 2بُعدی، اسکن خطی یا منطقهای و سیستمهای بینایی 3بُعدی هستند.
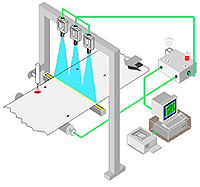
یک مثال از تنظیم سیستم بینایی یک بعدی
سیستمهای بینایی یک بعدی، سیگنال دیجیتال را خط به خط و نه کل تصویر را بار بار مورد بررسی قرار میدهند. به عنوان مثال میزان تفاوت بین گروه اخیری از ده خط کسب شده و گروه قبلی تر را ارزیابی میکنند. این تکنیک معمولاً برای شناسایی و دستهبندی عیوب در موادی تولید شده در فرآیندهای پیوسته استفاده میشود مانند کاغذ، فلزات، پلاستیک و سایر مواد برگ یا رول شونده غیر بافته.
سیستمهای بینایی دو بعدی
اغلب دوربینهای بازرسی که اسکن منطقهای انجام میدهند، شامل ثبت لحظهنگاریهای دوبعدی با رزولوشنهای مختلف هستند. نوع دیگری از بینایی ماشینی دوبعدی وجود دارد که بینایی خطی نامیده میشود و تصویر دوبعدی را خط به خط تشکیل میدهد. در این فرآیند، خط اول اسکن شده و سپس خط بعدی به آن افزوده تا تصویر کامل شود.

مقایسه اسکن منطقهای و اسکن خطی
نمونههای تصویری از بینایی ماشین در کاربردهای دشوار مانند اشیای استوانهای ، فضای محدود و سرعت بالا
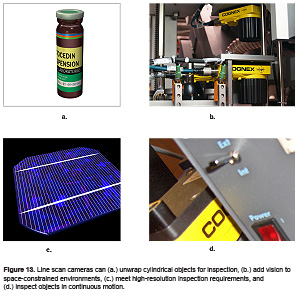
درک مزایای سیستمهای اسکن
دو رویکرد برای ثبت تصویر وجود دارد: اسکن منطقهای و اسکن خطی. تفاوت اصلی این دو روش در این است که چگونه تصویر ثبت میشود.
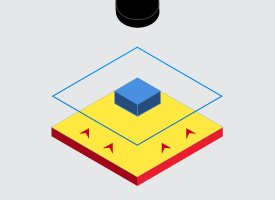
دوربینهای اسکن منطقهای دارای یک سنسور مستطیلی شکل هستند که تصویر را در یک فریم ثبت میکنند. تصویر نهایی عرض و ارتفاعی دارد که مطابق با تعداد پیکسلهای سنسور است. از این رو دوربینهای اسکن منطقهای برای کاربردهایی که اشیاء کوچک و ابعادشان در هر دو بعد تقریباً یکسان است مناسب هستند. اما دوربینهای اسکن خطی دارای یک سطر پیکسل هستند و تصویر نهایی را پیکسل به پیکسل و خط به خط میسازند.
در بعضی کاربردها مزایای خاصی دارند که عبارتند از: بررسی اشیاء استوانهای یا دایرهای که نیاز به چند دوربین اسکن منطقهای دارند اما یک دوربین خطی میتواند با چرخاندن شیء سطح کامل را بررسی کند. فضای محدود که دوربین باید از شیارهای نوار نقلیه عبور کند. رزولوشن بالاتر. مناسب بودن برای محصولاتی که به صورت پیوسته حرکت میکنند.
سیستمهای بینایی سه بعدی
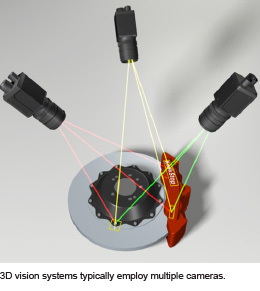
سیستم بینایی سه بعدی در بینایی ماشین چیست؟ استفاده از چند حسگر فاصلهیابی لیزری برای ایجاد تصویر سه بعدی
سیستمهای بینایی ماشینی سهبعدی نه تنها میتوانند محیط پیرامون خود را ببینند، بلکه مکان و جهتگیری اشیاء را نیز محاسبه میکنند. این سیستمها معمولاً شامل چند دوربین یا یک یا چند حسگر فاصلهیابی لیزری هستند.
کاربردهایی که از حسگرهای فاصلهیاب لیزری استفاده میکنند شامل بررسی سطح و اندازهگیری حجم میشوند و نتیجهای سهبعدی با استفاده از تنها یک دوربین تولید میکنند. در این موارد، شیء یا دوربین باید حرکت کند تا تمام محصول اسکان شود که مشابه اسکن خطی است. سپس نقشهای از ارتفاعات تولید میشود که از تغییر مکان پرتوهای لیزر بازتابیده در شیء به دست میآید.
تنظیمات چند دوربینی برای کاربردهای بینایی سهبعدی، روش دیگری را دنبال میکنند. این سیستمها از تریانگولاسیون لیزری برای ایجاد ابرنقطه، یا مدل دیجیتال شکل و مکان اشیاء استفاده میکنند. ابرنقطهها نتایج بازرسی بسیار دقیق و قابل اعتمادی تأمین میکنند.
نقشهبرداری سهبعدی حتی برای متغیرهای غیرقابل پیشبینی هم چون تغییرات کنتراست، رنگ، روشنایی و مکان، حساب میکند. بنابراین این نوع بینایی ماشینی برای کاربردهای سنجش، هدایت و شناسایی عیوب که نیاز به دقت بالا دارند ولی تغییرات محیط و اشیاء زیر بررسی را تحمل میکنند، انتخابی ایدهآل است.
افزودن ابعاد سوم به تحلیل تصویر، اتوماسیون کاربردهایی را که قبلاً برای خودکارسازی سنتی دشوار بودند را تسهیل میکند، در حالی که همه مزایا و امکانات بینایی دوبعدی حفظ میشود. این مزایا شامل:
بهبود کیفیت
پیشگیری از عیوب
همخوانی با الزامات ردیابی
کاهش ضایعات
افزایش بازدهی
افزایش بهرهوری میشود.
سیستمهای بینایی خودایستا
سیستمهای تجهیزشده و آسانالتنظیم
ساختارهای بینایی خودایستا بهطور کارآمد قیمت دارند و میتوان آنها را بهسرعت و بهآسانی تنظیم کرد. این سیستمها بهطور کامل شامل سنسور دوربین، پردازنده و ارتباطات هستند. برخی همچنین روشنایی و اپتیک خودبهخود بهکار میگیرند. در بسیاری موارد این سیستمها بهگونهای کوچک و ارزان هستند که میتوان آنها را در سرتاسر کارخانه نصب کرد. با استفاده از سیستمهای بینایی خودایستا در نقاط کلیدی فرآیند، میتوان عیوب را زودتر در فرآیند تولید شناسایی کرد و مشکلات تجهیزات را سریعتر رفع نمود. بیشتر آنها ارتباط اترنت داخلی دارند که کاربران را قادر میسازد تا بینایی را در سرتاسر فرآیند توزیع کرده و دو یا چند سیستم را بهطور کامل قابلمدیریت و قابلگسترش بههم متصل نمایند تا دادهها بین سیستمها مبادله و توسط میزبان مدیریت شوند. شبکهای از سیستمهای بینایی را میتوان بهآسانی به شبکههای کارخانه و شرکت متصل نمود تا ایستگاههای کاری کارخانه با قابلیت TCP/IP بتوانند نتایج بینایی، تصاویر، دادههای آماری و سایر اطلاعات را از راه دور مشاهده نمایند. این سیستمها محیطهای قابلتنظیم را فراهم میکنند که تنظیم ساده راهنماییشده یا برنامهریزی و اسکریپتنویسی پیشرفتهتر را امکانپذیر میسازند. برخی سیستمهای بینایی خودایستا، محیطهای توسعه را فراهم میآورند که تنظیم ساده با قدرت و انعطافپذیری برنامهریزی و اسکریپتنویسی برای کنترل بیشتر تنظیمات سیستم و پردازش دادههای بینایی را امکانپذیر میسازد.
سکوهای بینایی ماشینی
پیادهسازی بینایی ماشینی میتواند روی چند سکوی سختافزاری، از جمله سیستمهای مبتنی بر کامپیوتر، کنترلکنندههای بینایی طراحیشده برای کاربردهای دوبعدی چنددوربینه و سهبعدی، ساختارهای بینایی خودایستا، سنسورهای تصویربرداری ساده و خوانندههای بارکد مبتنی بر تصویر قرار گیرد.
انتخاب سکوی مناسب بینایی ماشینی بهطور کلی به نیازمندیهای کاربرد، از جمله محیط توسعه، تواناییها، معماری و هزینه بستگی دارد.
برای اطلاعات بیشتر:
کنترلکنندههای بینایی
سیستمهای بینایی خودایستا
سنسورهای بینایی
خوانندههای بارکد مبتنی بر تصویر
سکوهای بینایی ماشینی مبتنی بر رایانه
سیستمهای مبتنی بر رایانه بهراحتی با دوربینهای مستقیماً متصل یا تختههای ثبت تصویر تعامل دارند و نرمافزار برنامهنویسی کاربردی بینایی ماشینی قابل تنظیمی بهخوبی آنها را پشتیبانی میکند. علاوه بر این، رایانهها امکانات توسعه کدهای کاربردی با استفاده از زبانهای آشنا و پشتیبانیشدهای مانند ویژوال سی/سی++، ویژوال بیسیک و جاوا را فراهم میآورند. اما توسعه روی رایانه معمولاً طولانی و پیچیده است، بنابراین معمولاً محدود به نصبهای بزرگ و توسعهدهندگان باتجربه بینایی ماشینی میشود.
با این حال، مزایای برنامهنویسی آسان و پشتیبانی گسترده روی رایانهها، این سکو را برای پروژههای آزمایشی و تحقیقاتی مناسب میسازد.
کنترلکنندههای بینایی ماشین
کنترلکنندههای بینایی توانایی و انعطافپذیری سیستمهای مبتنی بر رایانه را دارا هستند، اما بهتر توانایی تحمل شرایط سخت کارخانهها را دارند. کنترلکنندههای بینایی اجازه میدهند کاربردهای سهبعدی و دوبعدی چنددوربینه بهطور آسانتر پیکربندی شوند، مثلاً برای وظایفی که فقط یکبار انجام میشوند و مقدار معقولی زمان و هزینه برای توسعه در نظر گرفته شده است. این اجازه میدهد کاربردهای پیشرفتهتر بهطور بسیار ارزانتر پیکربندی شوند.
کنترلکنندههای بینایی بهطور خلاصه با تواناییهای پیشرفتهاما آسانالتنظیم ارزش خرید بالایی دارند.
ربات ها و بینایی ماشین
سیستم بینایی ماشین، که همچنین به عنوان بینایی ربات شناخته میشود، نقش اساسی در ادغام درک بصری با رباتیک ایفا میکند. در اینجا نحوه عملکرد آن آمده است:
شناسایی و موقعیتیابی اشیاء: سیستمهای بینایی ماشین با استفاده از دوربینهای دیجیتال (یا چندین دوربین) تصاویر را ضبط میکنند. این تصاویر به صورت فریم به فریم پردازش میشوند. دادههای تفسیر شده از این تصاویر به رباتها کمک میکند تا اشیاء را در محیط خود شناسایی و موقعیتیابی کنند.
کاربردها
بازرسی مواد: رباتهای مجهز به بینایی ماشین میتوانند مواد را از نظر عیوب بررسی کنند و کنترل کیفیت را تضمین کنند.
تشخیص اشیاء: سیستمهای بینایی به رباتها اجازه میدهند تا اشیاء یا الگوهای خاصی را تشخیص دهند.
تشخیص الگو: در صنایع مختلف (مانند بهداشت، الکترونیک و بانکداری) تشخیص الگو بسیار مهم است.
انواع سیستمهای بینایی
فناوریهای ۱بعدی: ارتفاع اشیاء را اندازهگیری میکنند یا بارکدها را روی نوار نقالههای متحرک میخوانند.
اسکنرهای ۲بعدی: بارکدهای ۱بعدی و ۲بعدی را می خوانند، اشکال را تشخیص می دهند.
فناوری ۳بعدی: عمق ادراک و اندازهگیریهای دقیق را فراهم میکند.
حسگرهای نور ساختاریافته: نور را روی قطعات تابانده و ابعاد را تجزیه و تحلیل میکنند.
دوربینهای زمان پرواز: از نور مادون قرمز برای نقشهبرداری عمق استفاده میکنند.

هدایت ربات
رباتها از سیستمهای بینایی برای هدایت استفاده میکنند:
یافتن اشیاء: رباتها اشیاء را پیدا کرده و مختصات آنها را تعیین میکنند.
بازرسی: رباتها با حرکت دادن دوربینها در اطراف قطعات، آنها را بررسی میکنند.
انواع رباتها
رباتهای دستکاریکننده: این رباتهای بزرگ بارهای سنگین را بلند میکنند و اغلب در قفس استفاده میشوند.
رباتهای همکار (Cobots): برای کار در کنار انسان طراحی شدهاند، آنها وظایف برداشتن و قرار دادن را انجام میدهند.
رباتهای انبار: این رباتها معمولاً از حسگرهای یکپارچه استفاده میکنند و به دوربینهای خارجی وابسته نیستند.
به طور خلاصه، بینایی ماشین به رباتها این امکان را میدهد که «ببینند»، دادههای بصری را تفسیر کنند و به طور مؤثر با محیط اطراف خود تعامل داشته باشند.